
Synthetic (robotic) vision
The SYCLOP perceiver
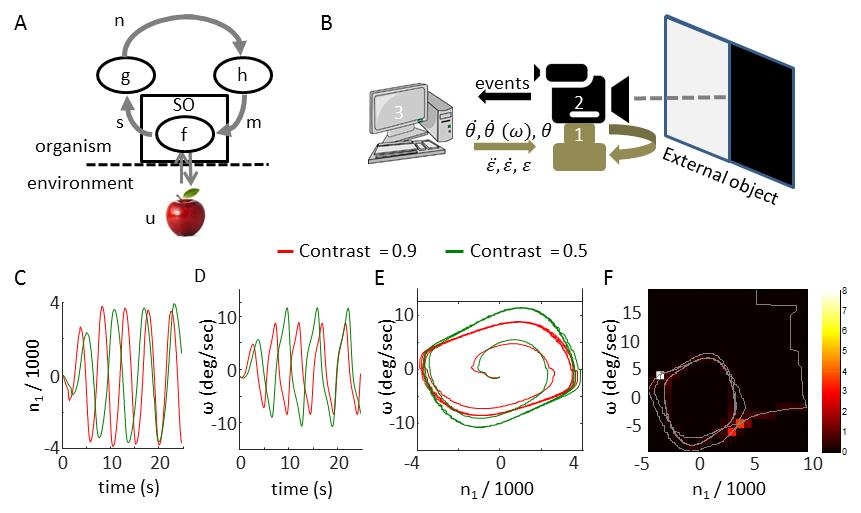
Figure 1
Our lab-developed robotic perceiver, the SYCLOP, is composed of an event-based camera (sensitive to luminance transitions in each pixel) that is installed on a mount with horizontal and vertical rotating motors, all integrated within a programmable closed loop system.
The SYCLOP is designed to employ active sensing – its camera’s sensors are silent when both the camera and the environment are static.
Our synthetic experiments are designed to test:
- what can and what cannot work in a simple active perceiver
- how can feasible perceptual schemes be physically implemented.
The closed loop architecture is flexible; we are currently evolving this system in an inside-out manner, by adding novel loops that address novel challenges. The lowest-order loops of SYCLOP are designed to ‘perceive’ basic local visual features such as the contrast, orientation and curvature of an edge, as well as motion. A CLP model of contrast has already been implemented in such a loop; a basic level of motion perception, smooth pursuit, emerged in this this loop without any explicit design.
Next, we will implement object and motion perception.
Relevant papers
-
Perception as a closed-loop convergence process
Ahissar E. & Assa E. (2016) eLife. 5, 12830. -
Visual hyperacuity with moving sensor and recurrent neural computations
Rivkind A., Ram O., Assa E., Kreiserman M. & Ahissar E. (2022)
Local AI
represents a shift away from the predominant global approach in artificial intelligence towards more personalized, resource-efficient, and safer solutions tailored to specific local contexts.
Some key aspects and advantages of local AI:
- Resource Efficiency: Local AI systems are designed to be low-power and resource-efficient. They don't rely on large data centers or extensive cloud computing resources, making them more environmentally friendly and cost-effective. This is important in a world increasingly concerned with sustainability and energy conservation.
- Safety and Privacy: With local AI, data and computations stay on the device or within a localized network, reducing the risk of data breaches and privacy violations. Users have more control over their data, which is a critical concern in the age of data privacy regulations.
- Individuation: Local AI can be highly customized to individual users or small groups, allowing for more personalized experiences. This is especially valuable in applications like healthcare, where tailored treatments or recommendations can have a significant impact.
- Reduced Latency: Processing data locally reduces latency because there's no need to send data to a remote server and wait for a response. This can be crucial in applications that require real-time decision-making, such as autonomous vehicles or robotics.
- Offline Functionality: Local AI can operate without a constant internet connection, which is essential in areas with unreliable or no connectivity. This expands the reach of AI applications to remote or underserved regions.
- Situated behavior. Local AI functions in the environment in which it was trained. With appropriate architecture, employing closed-loop perception and event-based operation, its behavior can dynamically adapt to its environment in real-time, allowing it to respond to actual events as they occur, rather than relying solely on prior events used for training.
Our developments:
- Active sensing. We are developing classifiers with architectures that incorporate front-end matching between the actual sensor and the processing network.
- Closed-loop perceivers. Our work involves developing systems that integrate active sensors and classifiers within closed-loop configurations. We explore various combinations of multi-level loops and the integration of supervised and unsupervised learning algorithms.
- Event-based processing. We are investigating the use of event-based sensing and event-based processing in closed-loop perceivers. Our research covers topics such as coding efficiency, learning capacity and speed and power savings.
Relevant papers
-
Visual hyperacuity with moving sensor and recurrent neural computations
Rivkind A., Ram O., Assa E., Kreiserman M. & Ahissar E. (2022)