Closed-loop computation
Two classes of neuronal architectures dominate in the ongoing debate on the nature of computing by nervous systems. The first is a predominantly feedforward architecture, in which local interactions among neurons within each processing stage play a less influential role compared with the drive of the input to that stage. The second class is a recurrent network architecture, in which the local interactions among neighboring neurons dominate the dynamics of neuronal activity so that the input acts only to bias or seed the state of the network.
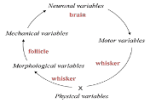
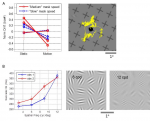
Fast feedback in active vibrissal touch
We studied the effects of touching an object on whisking in head-fixed rats. Simultaneous movements of whiskers C1, C2, and D1 were tracked bilaterally and their movements compared.
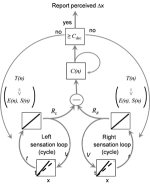
Motor-sensory adapation while perceiving object location
Tactile perception is obtained by coordinated motor-sensory processes. We studied the processes underlying the perception of object location in freely moving rats.
Modeling exploration via curiosity and novelty management
We analyzed exploratory behavioral data from two modalities: whisking and locomotion in rats and mice.