
Closed-loop computation
Two classes of neuronal architectures dominate in the ongoing debate on the nature of computing by nervous systems. The first is a predominantly feedforward architecture, in which local interactions among neurons within each processing stage play a less influential role compared with the drive of the input to that stage. The second class is a recurrent network architecture, in which the local interactions among neighboring neurons dominate the dynamics of neuronal activity so that the input acts only to bias or seed the state of the network.
The study of sensorimotor networks, however, serves to highlight a third class of architectures, which is neither feedforward nor locally recurrent and where computations depend on large-scale feedback loops. Findings that have emerged from our laboratory and those of our colleagues suggest that the vibrissa sensorimotor system is involved in such closed-loop computations. In particular, single unit responses from vibrissa sensory and motor areas show generic signatures of phase-sensitive detection and control at the level of thalamocortical and corticocortical loops. These loops are likely to be components within a greater closed-loop vibrissa sensorimotor system, which optimizes sensory processing.
Fast feedback in active vibrissal touch
We studied the effects of touching an object on whisking in head-fixed rats. Simultaneous movements of whiskers C1, C2, and D1 were tracked
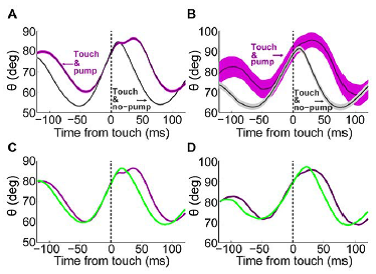
During free-air whisking, whisker protractions were typically characterized by a single acceleration-deceleration event, whisking amplitude and velocity were correlated, and whisk duration correlated with neither amplitude nor velocity. Upon contact with an object, a second acceleration-deceleration event occurred in about 25% of whisk cycles, involving both contacting (C2) and non-contacting (C1, D1) whiskers ipsilateral to the object. In these cases, the rostral whisker (C2) remained in contact with the object throughout the double-peak phase, which effectively prolonged the duration of C2 contact. These “touch-induced pumps” (TIPs) were detected, on average, 17.9 ms after contact. On a slower time scale, starting at the cycle following first touch, contralateral amplitude increased while ipsilateral amplitude decreased.
Our results demonstrate that sensory-induced motor modulations occur at various timescales, and directly affect object palpation. Using the visual language of statecharts, a dynamic, bottom-up computerized model of the brainstem loop of the whisking system was built in order to investigate the interaction between sensory feedback and CPG activity during whisking behavior. The model ruled out all hypothesized mechanisms but one – excitatory loop via extrinsic muscles - which adequately simulated the corresponding motion observed in the rat.
Motor-sensory adapation while perceiving object location
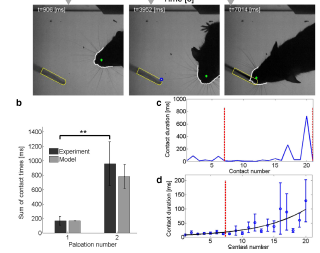
Tactile perception is obtained by coordinated motor-sensory processes. We studied the processes underlying the perception of object location in freely moving rats.
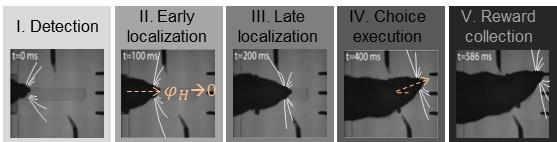
We found that the rats developed stereotypic head and whisker movements to solve this task, in a manner that can be described by several distinct behavioral phases. During two of these phases the rats’ whiskers coded object position by first temporal and then angular coding schemes. We then introduced wind (in two opposite directions) and re-measured their perceptual performance and motor-sensory variables. Our rats continued to perceive object location in a consistent manner under wind perturbations, while maintaining all behavioral phases and relatively constant sensory coding. Constant sensory coding was achieved by keeping one group of motor variables (the “controlled variables”) constant, despite the perturbing wind, at the cost of strongly modulating another group of motor variables (the “modulated variables”).
The controlled variables included coding-relevant variables, such as head azimuth and whisker velocity. These results indicate that consistent perception of location in the rat is obtained actively, via a selective control of perception-relevant motor variables.
Relevant papers
-

Ahissar, E; Vaadia, E; Ahissar, M; Bergman, H; Arieli, A; Abeles, M (1992). Dependence of cortical plasticity on correlated activity of single neurons and on behavioral context. Science 1992 Sept 4; 257(5075):1412-5..
-
(1998). Temporal-code to rate-code conversion by neuronal phase-locked loops. Neural Computation. 10:597-650.
-
(2003). Closed-loop neuronal computations: Focus on vibrissa somatosensation in rat. Cerebral Cortex. 13:53-62.
-
(2005). PROCESSING OF THE TEMPORAL ENVELOPE OF SPEECH. The Auditory Cortex A Synthesis of Human and Animal Research.
-
(2012). Fast Feedback in Active Sensing: Touch-Induced Changes to Whisker-Object Interaction. Plos One. 7.
-
(2013). Tactile Modulation of Whisking via the Brainstem Loop: Statechart Modeling and Experimental Validation. Plos One. 8.
-
(2015). Motion Makes Sense: An Adaptive Motor-Sensory Strategy Underlies the Perception of Object Location in Rats. JOURNAL OF NEUROSCIENCE. 35:8777-8789.
Modeling exploration via curiosity and novelty management
We analyzed exploratory behavioral data from two modalities:
We found that these rodents maximized novelty signal-to-noise ratio during each exploration episode, where novelty is defined as the accumulated information gain. We further found that these rodents maximized novelty during outbound exploration, used novelty-triggered withdrawal-like retreat behavior, and explored the environment in a novelty-descending sequence.
We applied a hierarchical curiosity model, which incorporates these principles, to both modalities. We show that the model captures the major components of exploratory behavior in multiple timescales: single excursions, exploratory episodes, and developmental timeline. The model predicted that novelty is managed across exploratory modalities. Using a novel experimental setup in which mice encountered a novel object for the first time in their life, we tested and validated this prediction. Further predictions, related to the development of brain circuitry, are described.
This study demonstrates that rodents select exploratory actions according to a novelty management framework and suggests a plausible mechanism by which mammalian exploration primitives can be learned during development and integrated in adult exploration of complex environments.
Relevant papers
-
(2012). Hierarchical curiosity loops and active sensing. Neural Networks. 32:119-129.
-
(2014). Learning and control of exploration primitives. Journal Of Computational Neuroscience. 37:259-280.
-
(2014). Emergent Exploration via Novelty Management. Journal Of Neuroscience. 34:12646-12661.